Core Laboratory Information
-
Core Laboratory usage for the College of Engineering
- All introductory feedback control systems courses in the departments of Aerospace Engineering, Electrical and Computer Engineering, Industrial & Enterprise Systems Engineering, and Mechanical Engineering use this laboratory for instruction in the basic concepts of control systems with emphasis on frequency and time domain modeling, state variable representations, and laboratory techniques.
- After initial introductory simulation studies using both an analog and a digital computer, the students look at identification and control of a DC motor. Additional experiments involve control of a 4th order torsional plant, inverted pendulum, etc. Typical control algorithms might be PD, PID, full state feedback, or observer control. In some courses, students complete a final project, which varies from year to year. Recent final projects have included balancing control and lead compensation of the Pendubot and another inverted pendulum experiment we call the Reaction Wheel Pendulum.
Modular Equipment
All Control Systems lab experiments use modules. These enable experiments ranging from PID control of a simple motor/pot system up to full observer control of a 6th order mass/spring/damper system.Bench Equipment used by the Control Systems Lab

- Technical Manufacturing Corp. (TMC) Optical Breadboard
- Custom-built modules-DC motors, tachometers, potentiometers, flywheels, torsion springs, optical encoders, and brakes
- Hewlett Packard DSO6012A Oscilloscope
- Hewlett Packard 33120A Function Generator
- Hewlett Packard 34401A Multimeter
- Hewlett Packard 6632A DC Power Supply
- Comdyna GP-6 Analog Computer
- PC with DAQ card for optical encoder, DAC and ADC
- Advanced Motion Controls 12A8 PWM Amplifier
- Agilent GPIB Card
- Dynamic Research Corp. (DRC) Optical Encoders
Satellite Laboratory Information

Four Hydraulic Trainer benches designed and donated by Parker fluidpower division, and four benches using Feedback watertank modules give students hands on experience. Four pnematically-controlled robots allow students to manipulate objects in two dimensions using air as the control fluid.
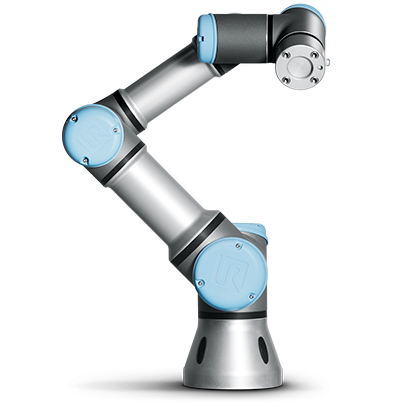 In the robotics lab, eight UR3 robots are used to teach robotic conventions, object manipulation, visual servo control and other techniques.
In the robotics lab, eight UR3 robots are used to teach robotic conventions, object manipulation, visual servo control and other techniques.
Abstract
We have developed a network of laboratories to support undergraduate and graduate education in Control Systems Technology in the College of Engineering at the University of Illinois at Urbana-Champaign. The cornerstone of our program is a centralized Core Laboratory, The College of Engineering Control Systems Laboratory, which provides basic instruction in feedback control systems to all Departments in the College of Engineering. This core laboratory feeds into a network of satellite laboratories, the Mechatronics Lab, the Hydraulics Lab and the Robotics Lab. The satellite labs are designed to provide both vertical and horizontal integration of control systems and related technology across departmental boundaries in the engineering curriculum. By elevating control systems laboratory development from the Department level to the College level we have gained a number of advantages including more efficient use of space and equipment, better leveraging of funds, elimination of overlap among individual departmental labs, better integration of control systems technology in the curriculum, the ability to hire a full time professional to manage the laboratory, and increased visibility with industry. At the same time we retain the integrity and autonomy of the separate Departmental curricula.
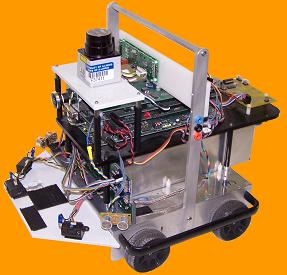
One of 20 robots designed and built at the University of Illinois. These robots are used in one of the satellite laboratories, the Mechatronics Lab.

The hydraulics lab uses 4 benches to design control systems using fluidics.

Students explore pneumatics control using two air powered robots.
Other Controls Links
University of Illinois
at Urbana-Champaign
306 N. Wright St.
Urbana, IL 61801