Robi
Drew Coverdill
Ken Heinz
GE423, Spring 2008
Ken and Drew were graduating
seniors in mechanical engineering. Our
Robot, affectionately called “Robi,” was the product of many lonely nights in
the lab as the sole group of two. Through
excellent teamwork and ingenuity, we created a robot worthy of its second place
finish.

Figure 1: The Creators- Ken Heinz (left) and Drew Coverdill
(right)
Key Points:
- Custom designed and fabricated single-servo
“finger” can gripper
- Precision Machined parts using tabletop mill
with G code
- Two bay ball repository
- State machine and double state machine C code
- Modified vision code
- VB application
The “finger” gripper was
modeled after the bone and tendon structure of the human finger, with kite
string used as the tendons. The gripper
was designed in ProE and fabricated preassembled using the Objet Rapid
Prototyping machine in the MechSE Ford Lab.
Other components were cut from PVC or plexiglass on the tabletop mill, using
computer control and G code for precision and repeatability.
Figure 2: Gripper arm modeled in ProE
We used only one servo in
the can gripper, while still lifting the can off the ground. Picking the can up allowed for the collection
of golf balls while holding the can, and thus faster completion of the
course. The need for only one servo in
the gripper allowed for the remaining two servos to independently control the
ball bay doors.
Video of “Robi” picking up the can
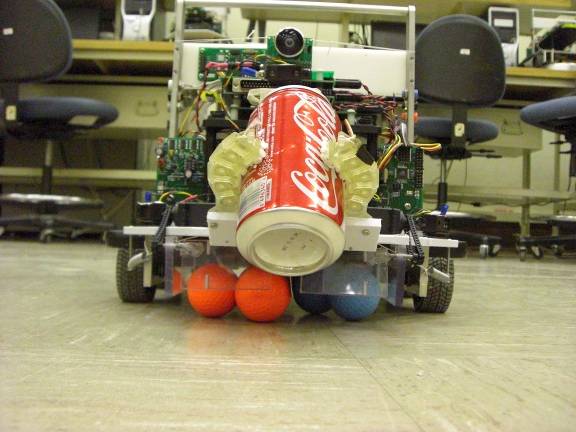
Figure 3: Front view with can up and all balls collected
The two bay ball repository
allowed collection of the orange and blue balls simultaneously, while letting
them to be discharged separately into their respective bins. We were able to complete the course in one
pass, depositing the can and collecting all the balls, resulting in the record
low time of 57.16 seconds.
Video of “Robi” picking up balls
Video of “Robi” running the course
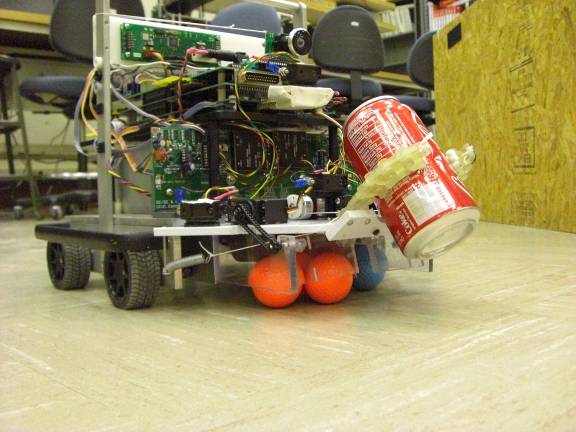
Figure 4:

Figure 5: Blue Side
A state machine was used to
control the robot’s actions, and for the more complicated actions, a second
state machine was used within the state to further break down the code while
keeping it understandable. By using the
state machine our robot was able to complete the course equally well running
counter clockwise or clockwise, with very little additional code required.
The Vision code was heavily
modified. Changes included: detecting
multiple colors simultaneously (still 1 color per frame), variable size (2x vs
4x), image location (for 2x), top cutoff, and bottom cutoff for each color,
thresholded output to color LCD screen, and display of all centroids on color
LCD screen in every frame. These changes
allowed for excellent vision based tracking of the can, golf balls, and
lights. We were proud to be able to see
the third light even in its highest position.
The Visual Basic Application
was nothing particularly fancy, but did track the where Robi though he was, the
current integrated and compass angle, and allowed us to start the robot, move
the gripper, change the initial position, and many other parameters, all with
the click of a button instead of the agony of flashit. Finally, Robi times his own runs, for
convenience.
Link to .zip file of all VB and C code
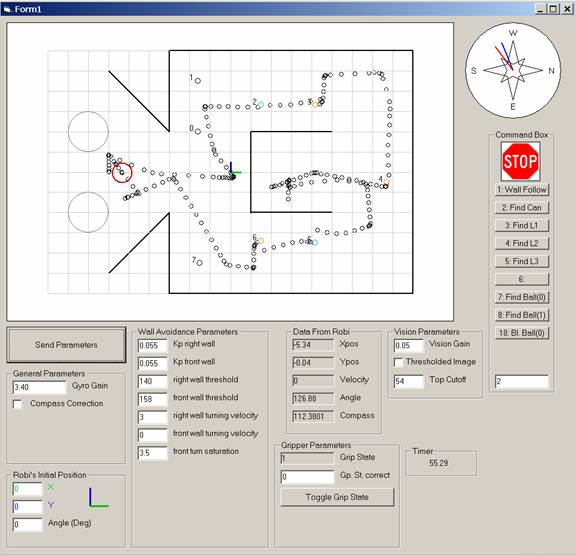
Figure 6: VB Interface