Introduction
Welcome to Grippy the Robot's website. Here you'll learn how grippy was made, a little of how he works, and how one little robot changed the lives of four college students. Those four students are Doug Hinckley, Tyson Dollinger, Alex Long and Mark Michelotti, and they each wrote a poetic tribute to the robot. Well, Alex didn't, probably because he was overcome with emotion, but Doug wrote one for him.
The robot lies still
Code loaded onto flash
Coming to life, Yes!
(Robot Haiku, Tyson Dollinger, 2008)
Orange balls, blue balls, scattered all around
Grabbing his can,
Bold Grippy owns this town!
(Doug Hinckley, 2008)
What was a gripper
Now gathers balls in the course
A new gripper clicks
(Doug Hinckley paraphrasing Alex Long who was overcome with emotion, 2008)
Grippy, you are a robot.
Disassembling you made us distraught.
You enjoyed recycling lots of cans.
You yourself will be recycled, sans
The gripper we made for you.
Ironic - but for now, adieu.
(Mark Michelotti, 2008)
The Story, Abridged for Length
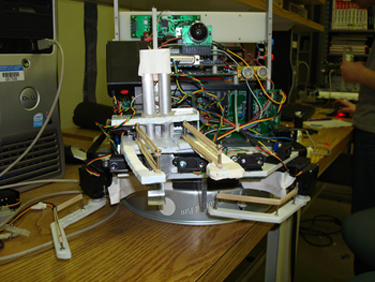
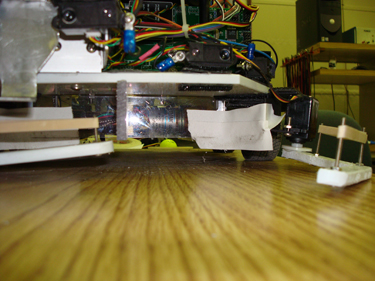
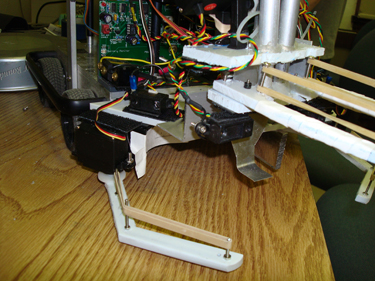
From the beginning, the goal was to design Grippy to collect both orange and blue golf balls immediately after picking up the can. We knew that we wanted to design a gripper for robot that could grab the can and lift it high enough off the floor to allow golf balls to be collected, and we wanted to design the gripper to work with a single servo. This would give us two servos to design an elaborate mechanism for collecting orange and blue golf balls simultaneously.
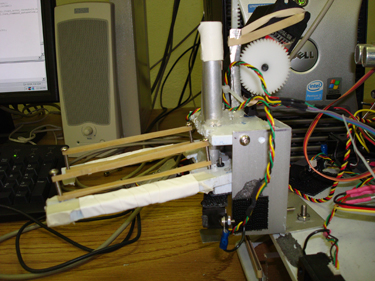
After a couple of weeks of trial and error, the final gripper for Grippy proved successful. The gripper uses a single servo and gear combined with a linear gear train that raises the gripper; as the gripper rises, the arms are closed due to a geometric part behind the gripper (like an inverted triangle). Since the final gripper for robot took a while to perfect, we had to use another gripper, which consisted of two arms connected to two servos, to pick up the can in our earlier design.
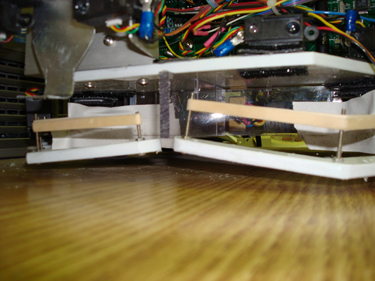
Once the final gripper was ready, we converted the old gripper into the actuators for collecting orange and blue golf balls. Each arm was attached to the front of the robot, creating two barriers that could independently be opened and closed for collecting golf balls of either type; a divider was constructed under robot, creating a separate compartment for each color golf ball.
The collecting of golf balls is actually automated into Grippy's other tasks. In other words, instead of having Grippy drive to specific points and search for golf balls, we incorporated the searching and retrieving of golf balls into our wall following and xy-coordinate driving functions. In this way, Grippy is always looking for orange and blue golf balls as he moves about the course. Whenever he finds a golf ball, he leaves his current task (wall following or driving to a location), retrieves the ball, and then returns to whatever he was doing before. The only instance where Grippy is not looking for golf balls is whenever he is driving towards a white light; in these cases, we thought it would be best for Grippy to not look for three different objects at once.
A state machine regulates Grippy's actions as he moves about the course; the state machine increments robot states as Grippy accomplishes tasks. The basic flow of the state machine is as follows:
1. Pick up the can.
2. Drive towards the first light and break the IR.
3. Drive towards the second light and move into wall following.
4. Wall follow (while looking for balls) to the top of the course.
5. Drive into the center of the course, and drive towards the last light to drop off the can.
6. After dropping off the can, go into wall following while searching for balls.
7. After five golf balls have been retrieved, wall follow out of the course and drop off the balls.
Of course, robot updates his position in several instances throughout the course. For dropping off the balls, he simply opens the orange ball compartment, dashes forward, and stops in front of the orange ball drop off, allowing the orange balls to roll out. He then drives over the blue drop off and performs a little victory jig. See our video to view robot in action!
The VB Side of Things
Grippy has a wireless modem that he works with to send data to a nearby PC. He sends his current position - meaning where he thinks he is - in the course, his angular position, and the number of each color of golf ball he has. The PC has a Visual Basic application running on it that takes that information and converts it to a graphical display of the robots position and orientation in the course. There is also a gyro angle vs. time plot to analyze the gyro drift.
Grippy can also recieve data from the VB application, including different gain values for the many controls he utilizes. These are quite useful when tuning Grippy for action. A screenshot of the VB app is shown below.

Grippy's path and relative velocity can be seen in the display by the location and separation of the trails.
Pictures and Stuff
Here are some pictures of Grippy diplaying different mechanical aspects.
 |
 |
 |
 |
 |
And here's the team:
Left to right: Alex Long, Doug Hinckley, Mark Michelotti, Tyson Dollinger
Here is a link to OUR CODE.
Here is a link to a VIDEO of Grippy in action.