SE
423 Lecture and Homework files
Lecture Handouts
- Course Syllabus
- YouTube
Page with Parts of Previous Semester Lectures
- RS232 Serial Port /
COM Port
- Optical Encoder
- SPI Serial Port Introduction
-
-
- State Machine Example
-
-
-
- Robot Sensors
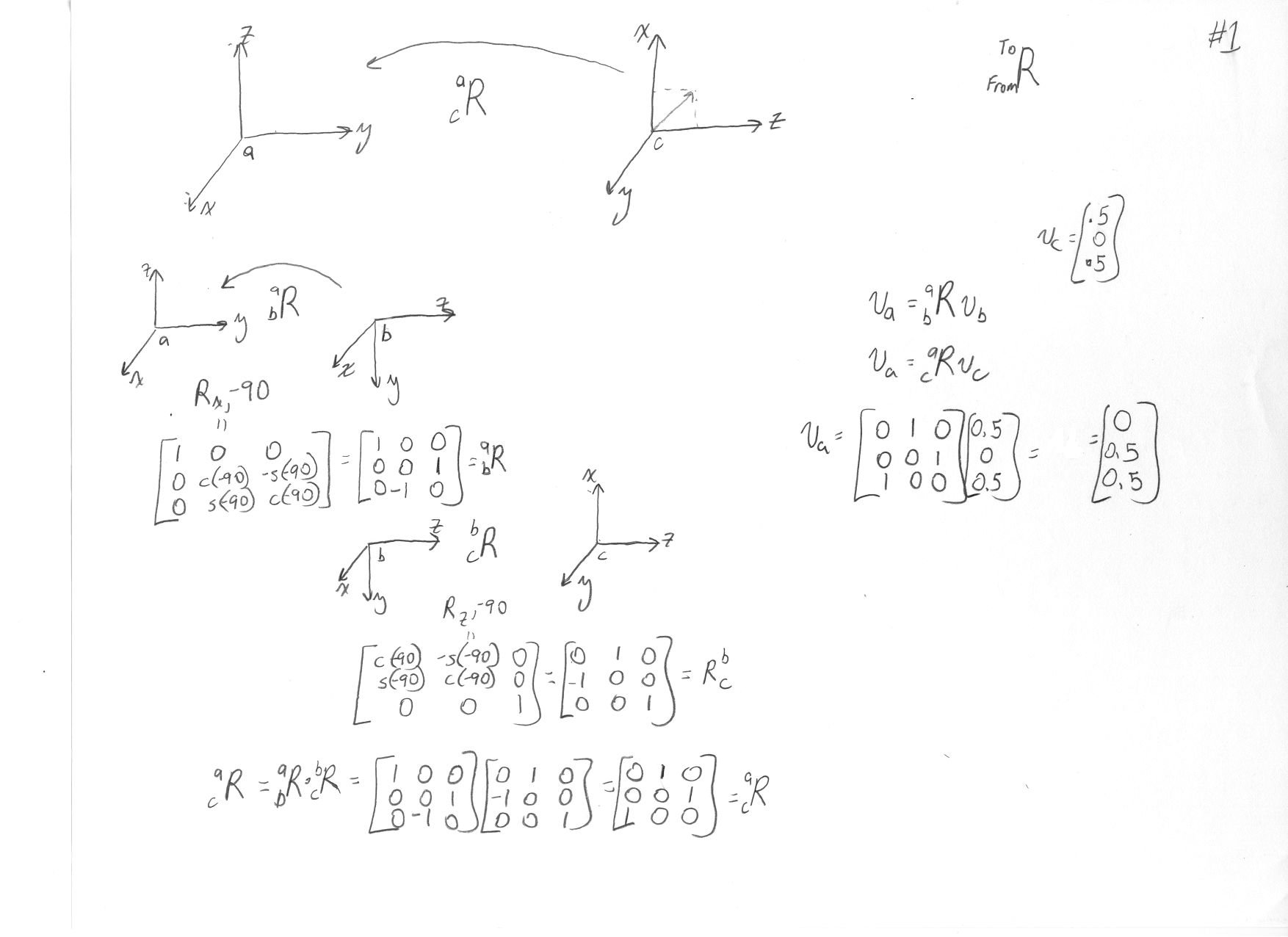
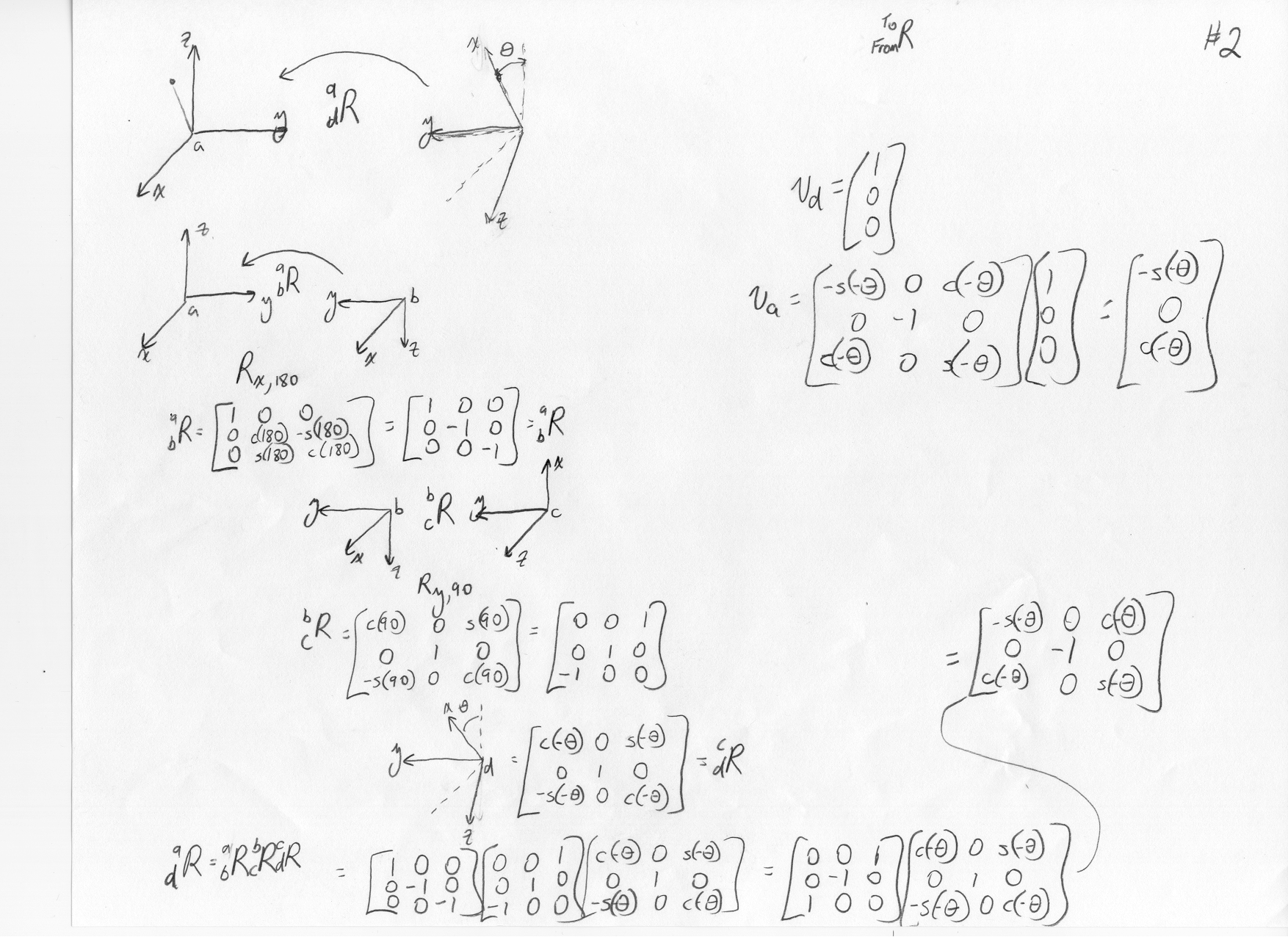
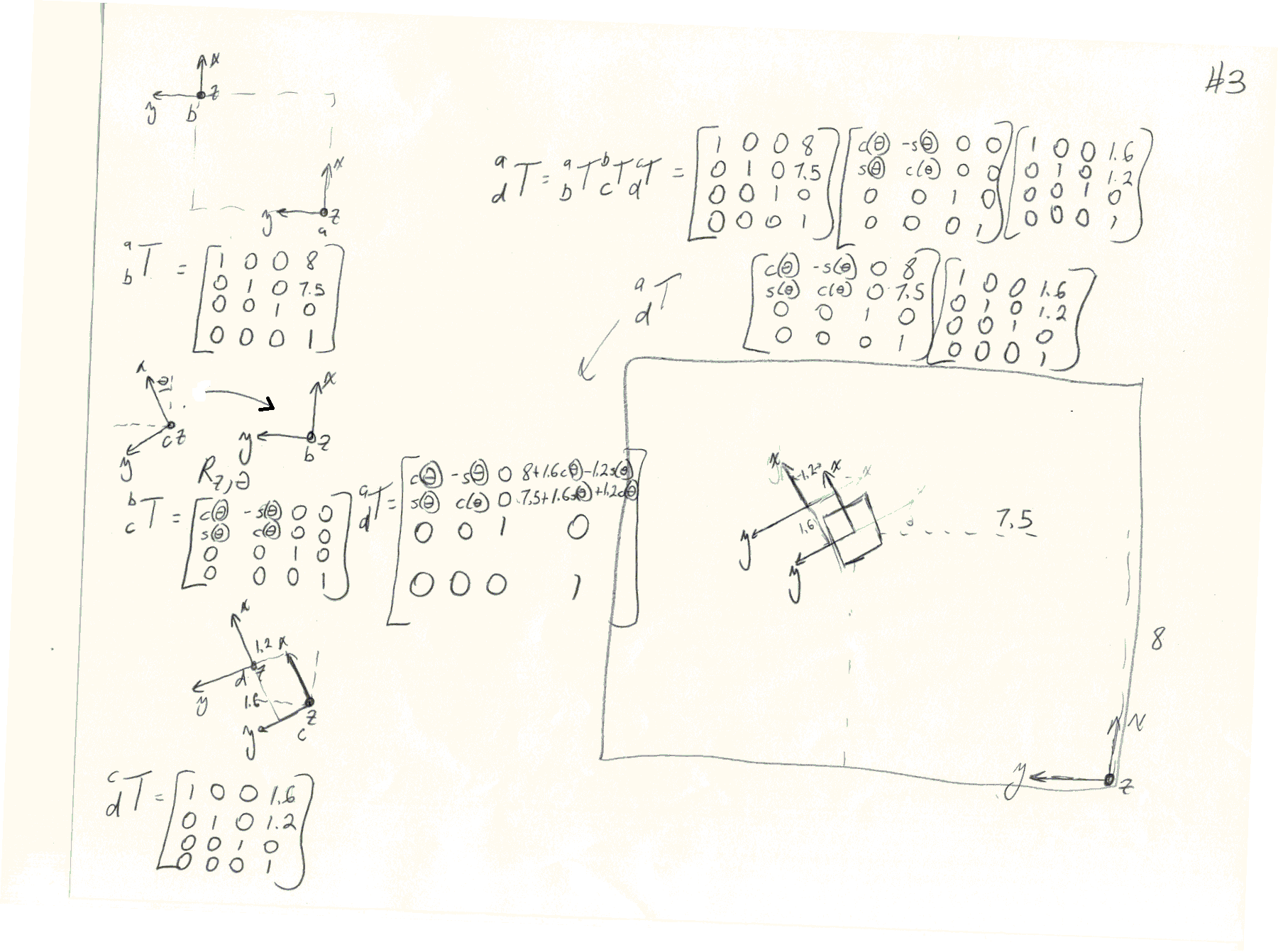
- Coordinate
Transformations, Examples Page
1, Page 2, Page 3
-
- Introduction to Vision Lab,
Link to Bayer Pattern
Description at WikiPedia
- Vision Processing Chapter
- Dead Reckoning and Kalman Filtering
- XY Point to Point Code (user_xy.c),
and include file xy.h
- Triangulation of Landmarks, Calculate
the Angle Between two Vectors
- Robot Path planning Brief Overview,
Bug Avoid Exit Code, Bug1 video example #1, Bug2 video example #1, Bug1 video example #2, Bug2 picture1, Bug2 picture2
- A Star Example,
A Star Pseudocode and Course Grid
Home Works
Homework
Supplementary Files
- List
of All Data Sheets
- List
of All Source and Library Files
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}