
Mark and Dan are both students in Electrical Engineering at the University of Illinois at Urbana-Champaign. Having previously taken the controls course ECE 486, Mark and Dan decided GE 423 would be a fun class to take and allow them to implement some of the control algorithms Mark and Dan learned in ECE 486.
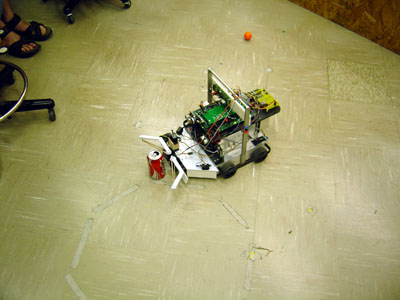
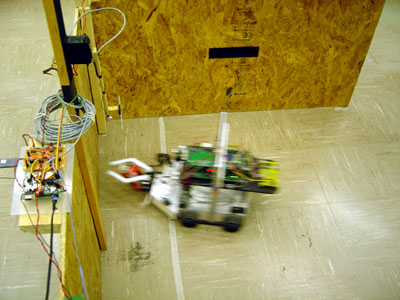
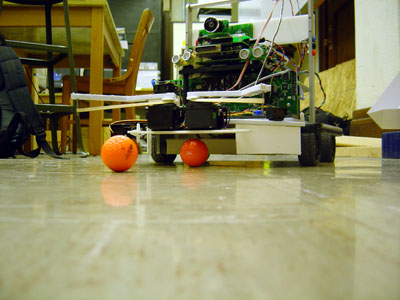
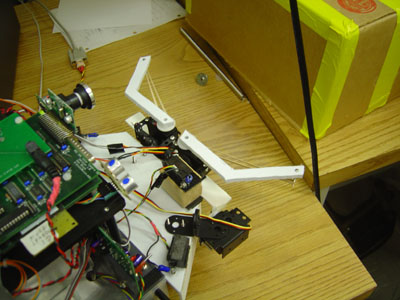
After breezing through the first half of the course, Mark and Dan entered the FINAL PROJECT!!!! phase as a lonely group of two. Completely outmanned and outgunned by the other gigantic groups that were 50%-100% larger, Mark and Dan bravely ventured forth to destroy and conquer the other groups' robots at a slow and leisurely pace. Armed with only a bare minimum knowledge of power tools and after multiple near maiming experiences Mark and Dan finally produced the amazing mandibles (See Right Top Picture). Unfortunately, Mandibles the Handibles had to be led out into the field and shot like Old Yeller. Happy Grabbers was soon to follow (See Right Middle Picture). Exhausted, our Heroes quickly jerry-rigged together a kung-fu action ball collector with a strategically placed wire-tie to correct drooping (See Right Bottom Picture).
With the mechanical aspects of Happy Bot completed, Mark and Dan then turned to more metaphysical endeavors. Transforming into poo flinging code monkeys, Mark and Dan quickly programmed a futuristic light show state machine that performed with the regularity of an elderly person on a full bran diet as demanded by Overlord Dan Block. Mark and Dan then spent the bulk of their time trying to solve the mystery of the kidnapped robot without the Hardy Boys' help.*
*Mark and Dan would like to state an official position of disdain for the irrelevant and inhumane requirements of kidnap detection and rescue.
Movie of our bot being Happy. Our Code