Links of Interest
Ralf's Awesome Mechatronics Website
Group Members: Brian Helfrich, Neera Jain, Nick Kohut, Scott Manwaring

From left to right: Neera, Scott, Ralf, Brian, and Nick.
Objective
Unlike past years in Mechatronics, this year’s students were required to compete in a course designed by the instructor rather than creating one of their own. A description of the course can be found here.
The main tasks required of each robot included the following:
left and right-hand wall following
finding, gripping, and carrying a Coca-Cola soda can to a designated spot
color recognition using image processing
collection and drop-off of orange golf balls
The ultimate goal was to complete the following tasks accurately in the least amount of time, with two caveats:
If the soda can was not placed directly underneath the designated light, the overall score was penalized by adding seconds to the final run time.
While a minimum of 2 balls must be collected, the collection of additional golf balls would be rewarded by seconds being subtracted off the total run time of the robot.
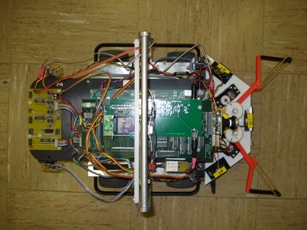
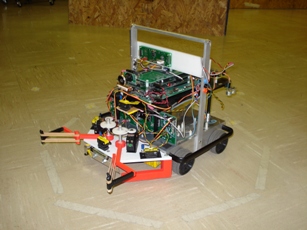
Our robot, creatively named Ralf, was fitted with a variety of sensors which were used to help him achieve these objectives. These components are described in detail here, followed by our strategy in navigating the course.
Components
The following components on the robot are used to help Ralf navigate the recycling course.
IR Sensors: These sensors determine how far the robot is away from an object by sending out an infrared beam and then determining how long it takes for the beam to return to the sensor. Ralf uses 5 such sensors, including one on the lower front (for when the can is not being held), one on the upper front (to “see” over the can), one on his left and right side (primarily for wall following), and one on the rear of the robot for when Ralf drives in reverse. (IR Sensor Photo)
Ultrasonic Sensors: These sensors work similarly to the IR sensors, but they use sound waves (rather than infrared beams) to determine their distance from objects. Ralf is equipped with two ultrasonic sensors which point directly toward the ground. If Ralf is picked up, the ultrasonic sensors will read a much larger distance and Ralf will know to go into his “lost” state. (Ultrasonic Sensor Photo)
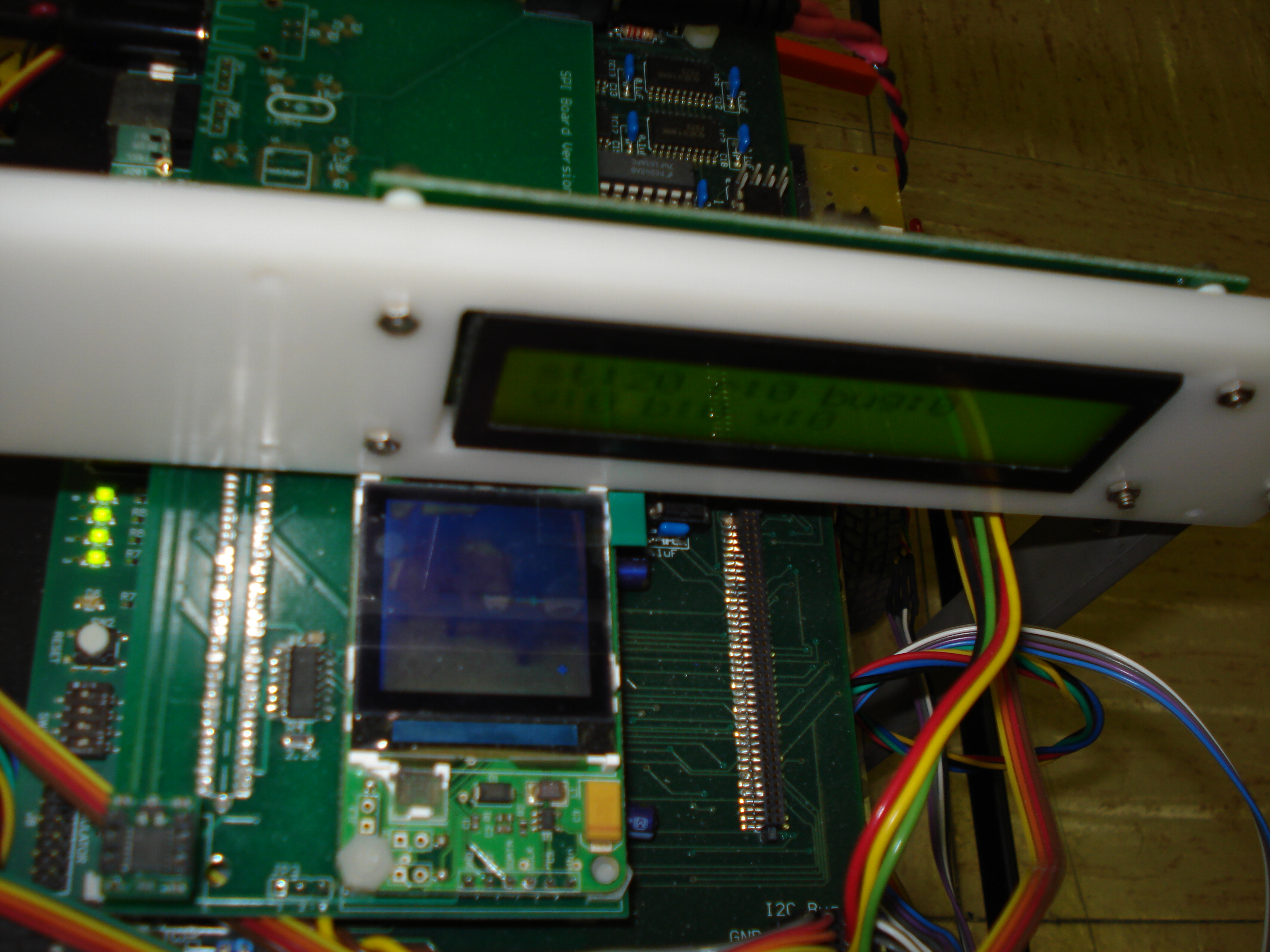
Camera and LCD: The camera and LCD screen are two of Ralf’s most powerful tools. Ralf processes images approximately every 1 second, and he can distinguish many different colors and objects. If Ralf sees green, he knows he is in a corner of the course and can “dead–reckon” to correct his position. If Ralf is in a state where he is looking for a golf ball, he will look for orange objects, and then move toward them until he is in a position to collect them using his golf ball trap (see below). In “lost” mode, seeing blue or yellow will help Ralf figure out which area of the course he is in. (LCD Screen Photo)
Rate Gyro: This sensor determines the rate at which Ralf is turning. When this result is integrated over time, the position of Ralf can be determined (assuming his initial position was known). This sensor can become unreliable over time due to accumulated errors, so when Ralf sees green (see “Camera and LCD”) he resets his angle.
Can-Gripping Arms: These SLA (insert what SLA stands for here) pieces are designed to close on a soda can when Ralf is in front of one. They use rubber bands to increase friction and gripping capability.
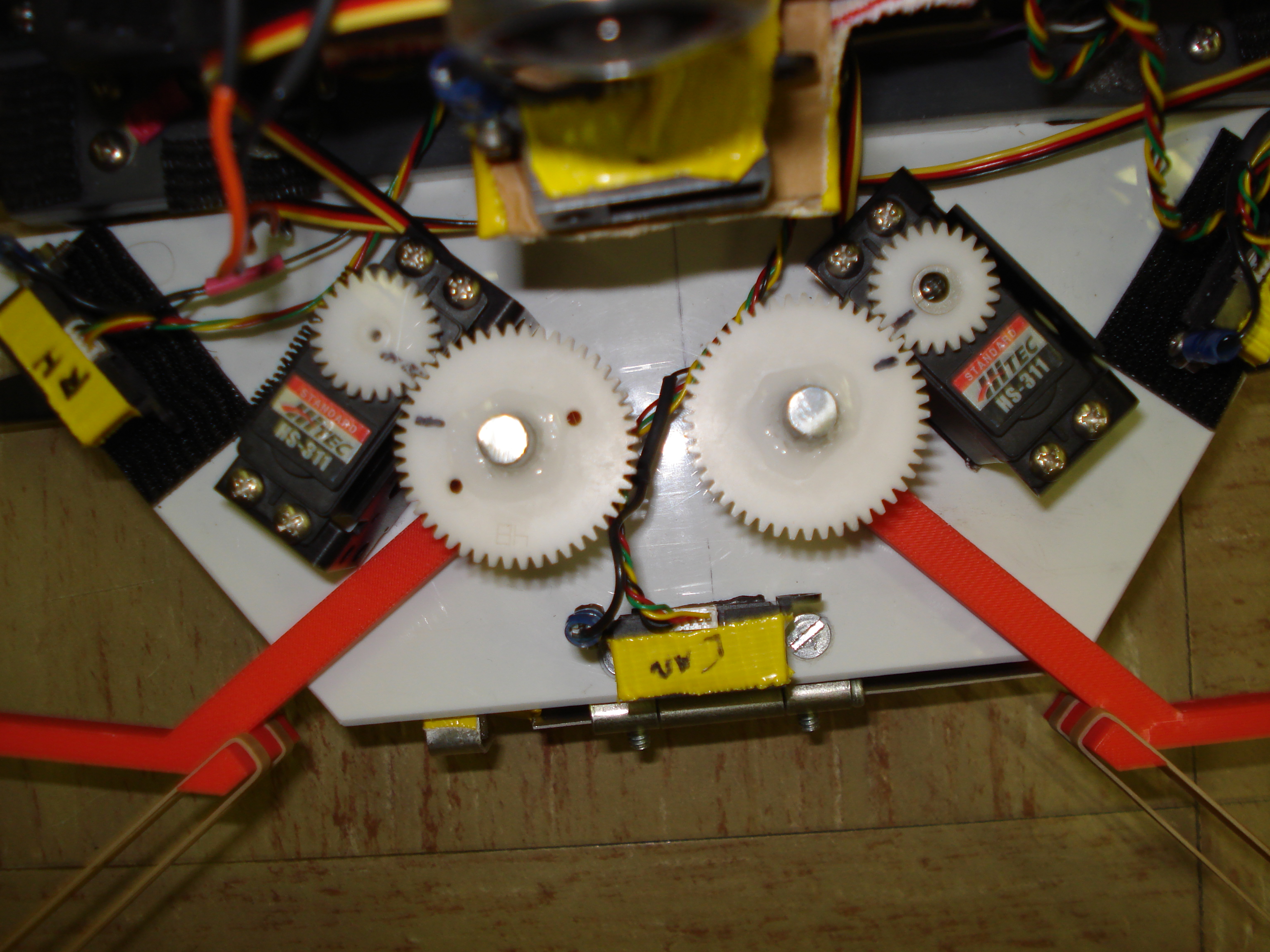
RC Servos: These servomotors move to a specific position based on the voltage sent to them. Two servos are connected to the gripping arms by a gear train and provide the power to open and close the arms on the can. An RC servo mounted on the underside of Ralf operates an arm that keeps the collected golf balls contained underneath him during normal operation; at the end of the course, the RC servo actuates a gate which opens to release the balls. (Gear Train and RC Servos Photo)
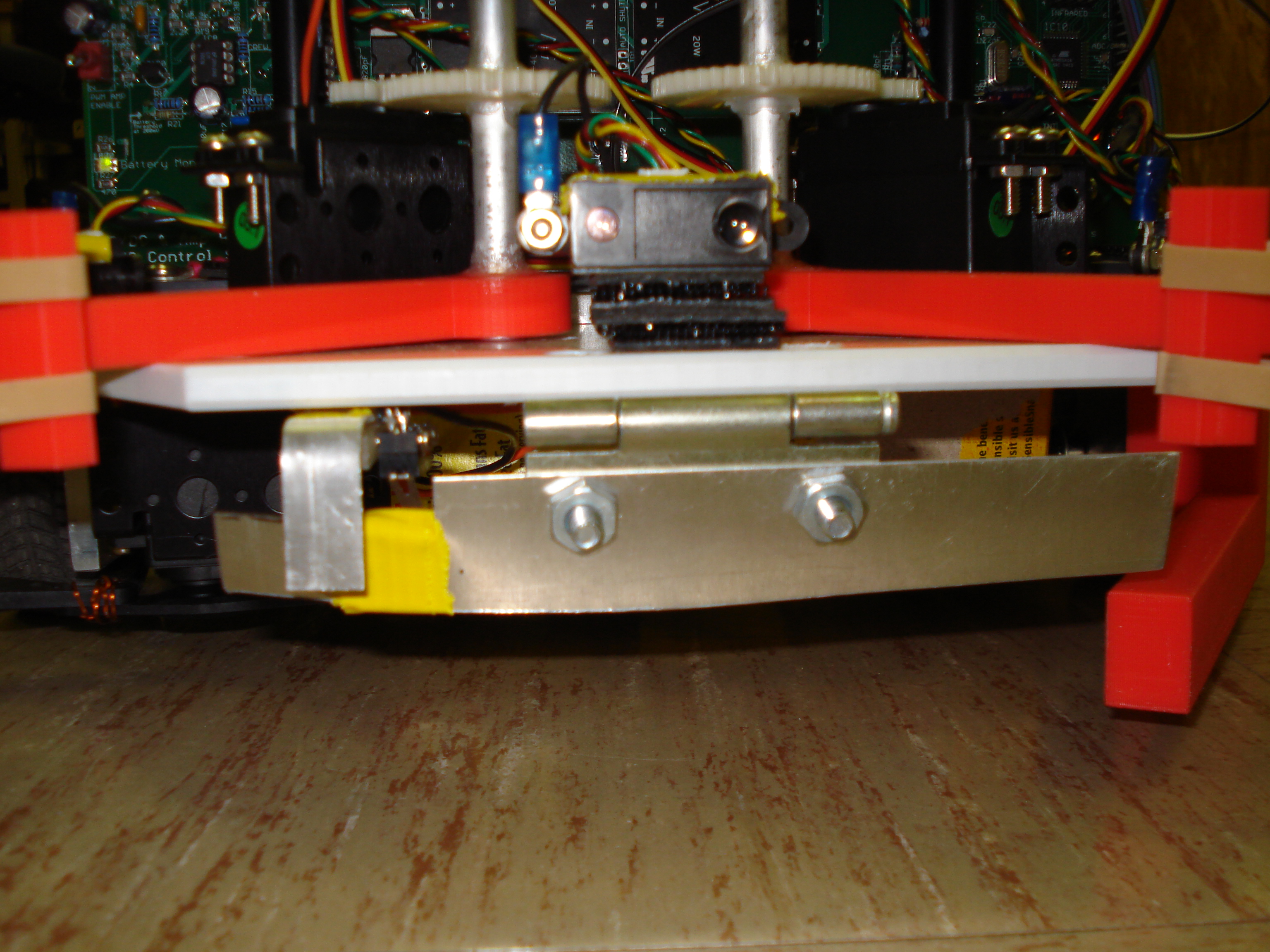
Golf Ball Trap: This simple device consists mainly of a hinge mounted to the bottom front of Ralf that has a bracket to prevent the hinge from opening forwards and letting any golf balls out. When Ralf gets close to a ball, he will charge it, and the golf ball will slip past the hinge and become trapped underneath Ralf.
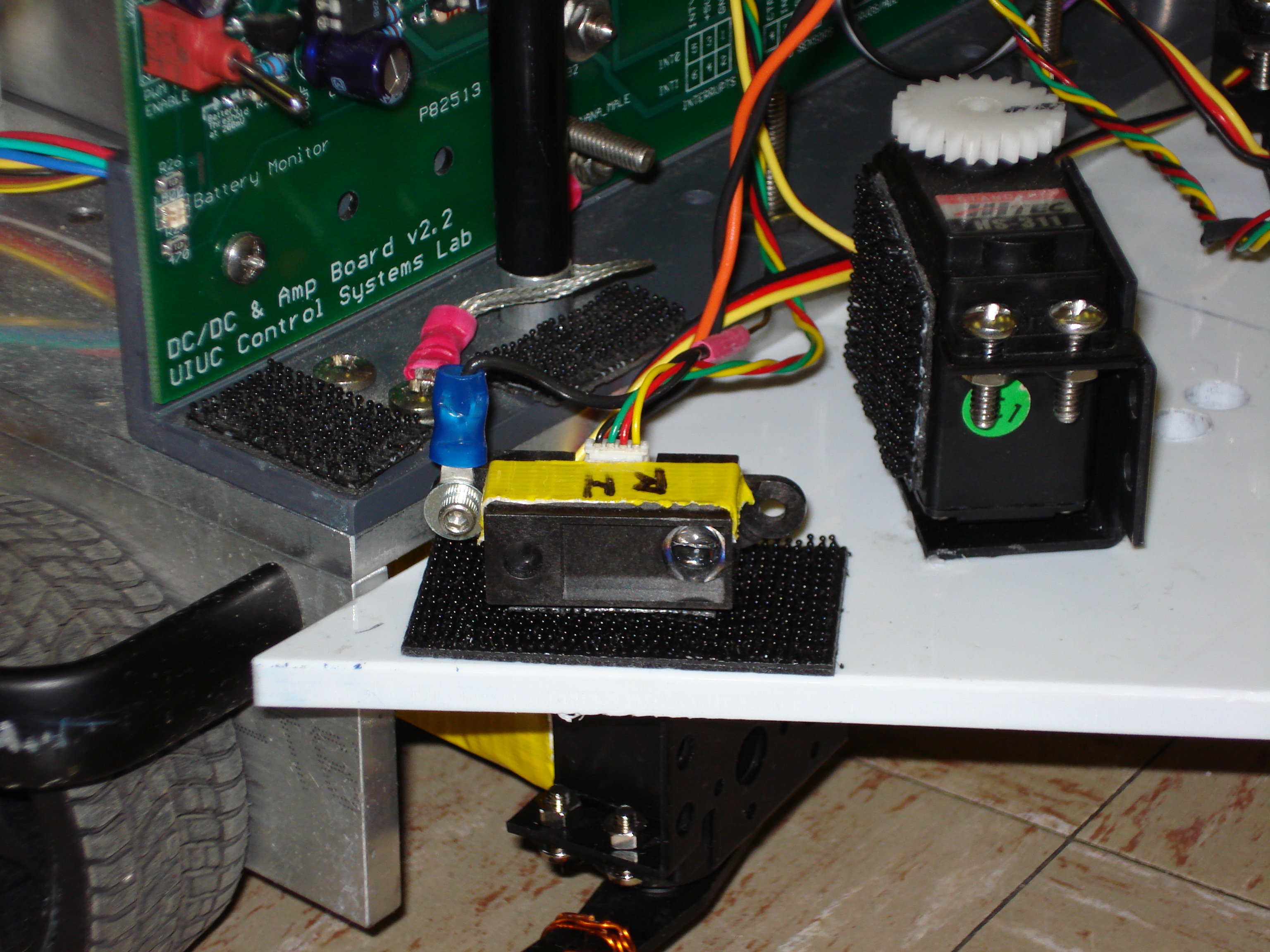
Feeler Switch: This is a simple on-off switch mounted near Ralf’s hinge. When the hinge is hit by a golf ball, the switch closes a circuit, indicating that the ball has been captured. After the switch is hit, it is not read again for some time to avoid unintentional multiple readings. (Feeler Switch Photo)
Strategy
Our strategy is broken down into individual tasks.
Can Finding: In order to find the can, our group decided to use our camera and look for red rather than to use the IR sensors and base our algorithm on distance away from an object. Once the can is found, Ralf approaches it and grabs it with his gripping arms.
Light Recognition: In order to find the first light, which must be “broken” to trigger the next series of lights, we again used the camera. This time, we wrote an algorithm which searches for blue as this was the color most recognized by the camera when it saw the light. After breaking the first light, Ralf always turns to the left (an algorithm based on the robot’s angle) to check if the light on the west side of the course has been lit; if it has, Ralf drives towards the light and then begins left-wall following towards the final light that he must break. If it has not been lit, Ralf drives in reverse towards the light on the east side of the current and begins right-wall following instead. He is able to drive in reverse using an IR sensor that is placed on his rear side.
Dropping off the can: Again, the camera is used to look for the light below which the can must be placed. Ralf turns until he sees the light and then drives straight forward towards the light. Based on a set threshold, Ralf stops and sends a voltage command to the RC servos which cause the arms to open and the can to be released.
Finding Golf Balls: After dropping of the can, Ralf begins right-wall following and looking for the orange golf balls which have been placed arbitrarily throughout the course. When Ralf sees enough orange to determine that he is in fact seeing a golf ball, he slows almost to a stop and then suddenly charges towards the ball, trapping it underneath him. A feeler switch mounted below Ralf keeps track of how many balls have been collected. Ralf continues looking for golf balls until he has found all five that have been placed throughout the course.
Dropping off the Golf Balls: When the feeler switch has been hit for the fifth time, Ralf switches states and knows that it is time to go home. Using x-y positioning code, Ralf is commanded to go to the finish circle at the south-east part of the course.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}