
 Course: GE 423 – Introduction to Mechatronics
Course: GE 423 – Introduction to Mechatronics
Instructor: Dan Block
Final project: Our Amazing Robot --- Bug Bot
Group member: Christopher
Co, Eric Uskali,
Tony Grinstead,
Bin Li
VB Interface Photos of Our
Robot Video
Introduction:
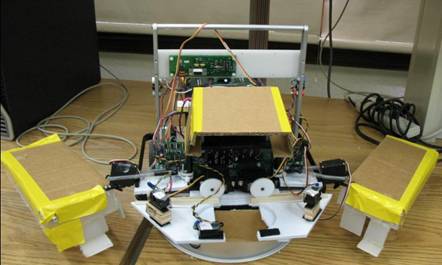
Hey, I assume that you have already seen the photos of our robot. The robot is pretty
Cool, isn’t it? The robot has a pair of ‘eyes’, and two
‘swings’, and what a bug bot!
Now, I introduce more to you about our
robot’s eyes and swings.
Eyes: We use RC-Servo as the robot’s eyes. The two
servos control our gripper to pick
up the empty soda-can. Our gripper is simple,
but very useful. With the front IR-sensor
installed in the gripper, the robot can sense
the can position, open the gripper, grab the
can and close the gripper…
Swings: They are very interesting parts in our robot,
which are used to get the golf
balls in the course. With the camera image,
the robot will sense the orange golf balls.
Depend on the right / left wall following,
the robot will open left / right swing to get
the ball, and after getting it, the swing
will be closed, and the robot will move on. More
funny thing is, the robot will close one side
swing, meanwhile, it will open the other side
swing to get the ball in certain position.
You can notice that in our video, which we will
upload pretty soon.
That’s it, and enjoy in the space of our
Bug Bot!