|
Contest
This contest has two major themes. The first is to
pick up an empty soda can, and while following the lit course
directions, to place the can in the Recycle Area. The second is
(either on the way to the Recycle Area or after) clean the streets of
golf balls (trash) and dispose of them in the garbage shoot.
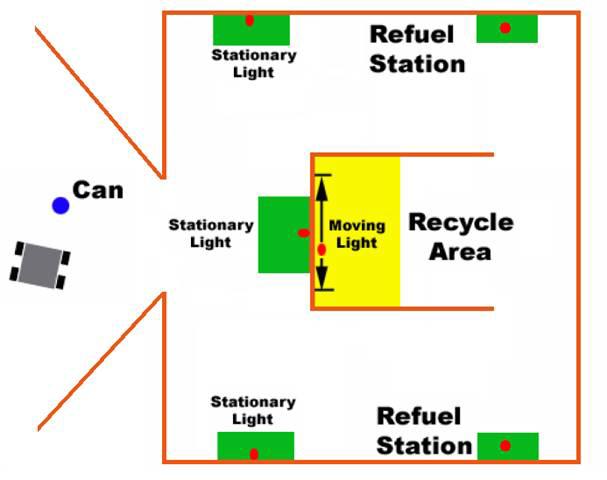
For the first part the goal is to pick up an empty
soda-can at the entrance to the course and then deposit the can directly
under the light 6 or less inches from the wall in the Recycle Area.
The soda-can is placed somewhere around the robot within 1.5 tiles
of the center of the robot. The
robot must find and pickup the can and then enter the course. In
the course the robot must first find the center “Stationary Light”.
Above this light is an IR sensor that will detect the robot at that
light. Once the robot trips that sensor, either the left or right
“Stationary Light” will turn on. This indicates which “Refuel
Station” the robot needs to visit. The “Refuel Stations” also have IR
sensors above them. Once the robot trips the correct “Refuel
Station’s” sensor, the “Recycle Area” light will turn on. This
light moves to a new random position each run. The robot should
find this light and place the can directly underneath the light.
The can should be put as close to the light as possible. Placement
error will be measured vertically (robot’s left/right) on the diagram
below. Course completion seconds will be added for each inch of
placement error.
For the second part of the contest, the goal is to find golf
balls in two different colors and move them to their respective shoots.
The garbage shoots are circular areas near the entrance to the course.
Tape will be placed on the floor to indicate their positions. The
golf balls just need to be dropped off at the garbage shoots. If
they roll away after being dropped off, it is the garbage shoot workers
fault, not yours. There will be 5 golf balls placed randomly
inside the course. The task is to move at least two of them to
their shoot. Additional golf balls found and disposed of will
subtract seconds from your overall contest time, so find as many as you
can. There will be at least 2 orange and 2 light blue balls each
run. The golf balls will be placed anywhere inside the five “Golf
Ball Areas” in the above picture. When a golf ball is collected,
the robot needs to communicate to VB application the X, Y position
and the color of the golf ball collected. Course completion time
will be subtracted from the overall time if the color is correct and
the X, Y position is within a 0.5 tile radius of the actual position.
The task is to locate the X, Y position of the golf
balls and move these golf balls to a certain X, Y position in the
course. For this reason, color landmarks will be located at two
far corners to allow the robot to correct its dead reckoned position.
Also, the front corners of the middle structure will be color marked for
possible landmark recognition.
[GE423 Contest]
|