FEBOT| (fē'bŏt) Flannel Energizer Robot -
Robot named due to its characteristic bunny ears, electronic nature, and tendency to sport plaids
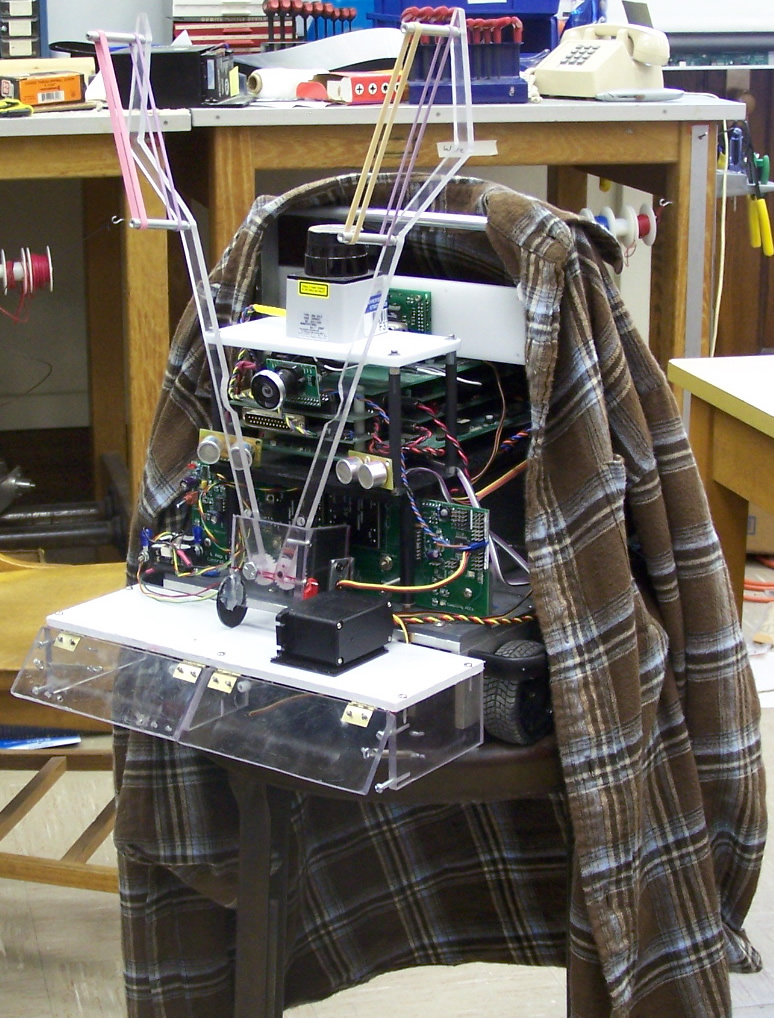
The FEBOT posing in its most fashionable attire |
The Amazing Recycling Robot Contest |
|
This contest has two major themes. First, the FEBOT has to pick up an empty soda can, and while following the lit course directions, place the can in the Recycle Area. Second, (either on the way to the Recycle Area or after) the FEBOT needs to perform its civic duties by cleaning the streets of golf balls (trash) and dispose of them in the garbage shoot. |
Our Team
Our Strategy
Jacob Kunowski (left), James Keiller, Steve Keres (right)
Our group immediately recognized the potential of the LADAR and the color camera in helping us complete the final contest. The LADAR allowed us to correct the drift in the dead-reckoning algorithm from almost anywhere in the course using a Kalman filter. With this correction we were able to zip around the course without worrying about drifting into walls. However, speed was not the only benefit the LADAR provided. A large part of the contest depended on our ability to consistently place the can directly in front of the recycle light and within the recycle zone. We implemented an algorithm that accurately and consistently placed the can within the recycle zone by continuously adjusting the FEBOT’s reference position using the correction from the LADAR and orientation feedback from the camera. The color camera helped place the can by updating the FEBOT’s reference orientation based on the angle of the recycle arm. The camera was not only helpful in this area of the course however. Using the camera and the color vision processing algorithm, we were able to quickly locate the can and golf balls in the course. Also, tight thresholds on the different colored objects allowed us to accurately detect the desired objects while rejecting any noise.
Noticing the advantages provided by the LADAR and color camera at an early stage, we were able to create a robust strategy for completing the contest. The first step of our strategy was to maximize the use of these two accurate and diverse sensors. To maximize their use, we designed and created an extra long can gripper (bunny ears) using transparent polycarbonate. Our long arms (ears) allowed us to carry the can above the FEBOT so that it would not obstruct the LADAR or color camera. The polycarbonate was not only transparent but thin and strong which made the arms invisible to the LADAR and color camera and strong enough to support our quick pick ups and recycles. Since our can gripper required two servos, we were only left with one to use for collecting the golf balls. Despite this challenge, we designed and created a double door golf ball collector that could collect and release only one compartment or keep both compartments closed.
We used our strategically designed can gripper and golf ball collector/sorter to move the FEBOT through the course as quickly as possible while always checking for both blue and orange golf balls. We divided the course into five main tasks: acquiring the can, hunting for golf balls on the way to the recycle center, recycling the can, hunting for golf balls on the way to the garbage shoots, and placing the golf balls in their respective garbage shoots. Each task was divided into sub-tasks almost all of which were completed using a closed loop proportional control law. Using closed loop control laws along with accurate senor data, we were able to significantly increase our speed and consistency versus using open loop controls.
Our Performance
Downloads
Contest Complete Description (pdf)
Code Composer Studio Project (zip)
Visual Basic Project (zip)