The Problem
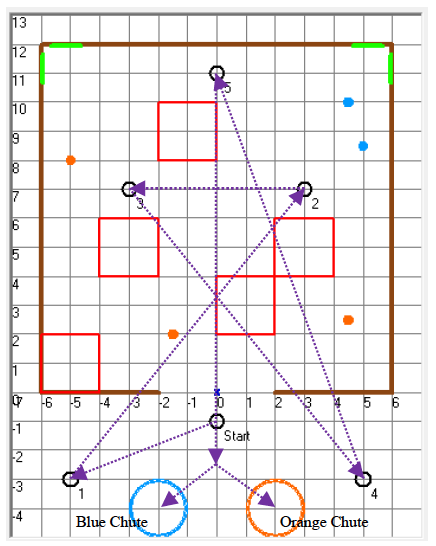
The Spring 2013 Project for GE423 was to build code to allow an autonomous robot to navigate an obstacle course. The 12x12ft course contained 5 obstacles - 2x2 foot squares - and 5 golf balls. The golf balls were either orange and blue - with a maximum of 3 of one color. In addition, there were 5 pre-determined destinations that needed to be visited in the specified order before returning the balls to their respective chutes. These destinations were:
- Stop 1: (-5, -3)
- Stop 2: (3, 7)
- Stop 3: (-3, 7)
- Stop 4: (5, -3)
- Stop 5: (0, 11)
Several restrictions were placed on the object placement. These assumptions were key to solving the course.
- Obstacles will be placed such that each corner has x- and y-coordinates that are multiples of 2.
- Obstacles will not block completely the entrance to the course.
- Obstacles will not be placed with a center at y=11.
- Golf balls may not be closer than 2.5 feet from the center of an obstacle.
- Golf balls may not be closer than 1 foot from the course wall.