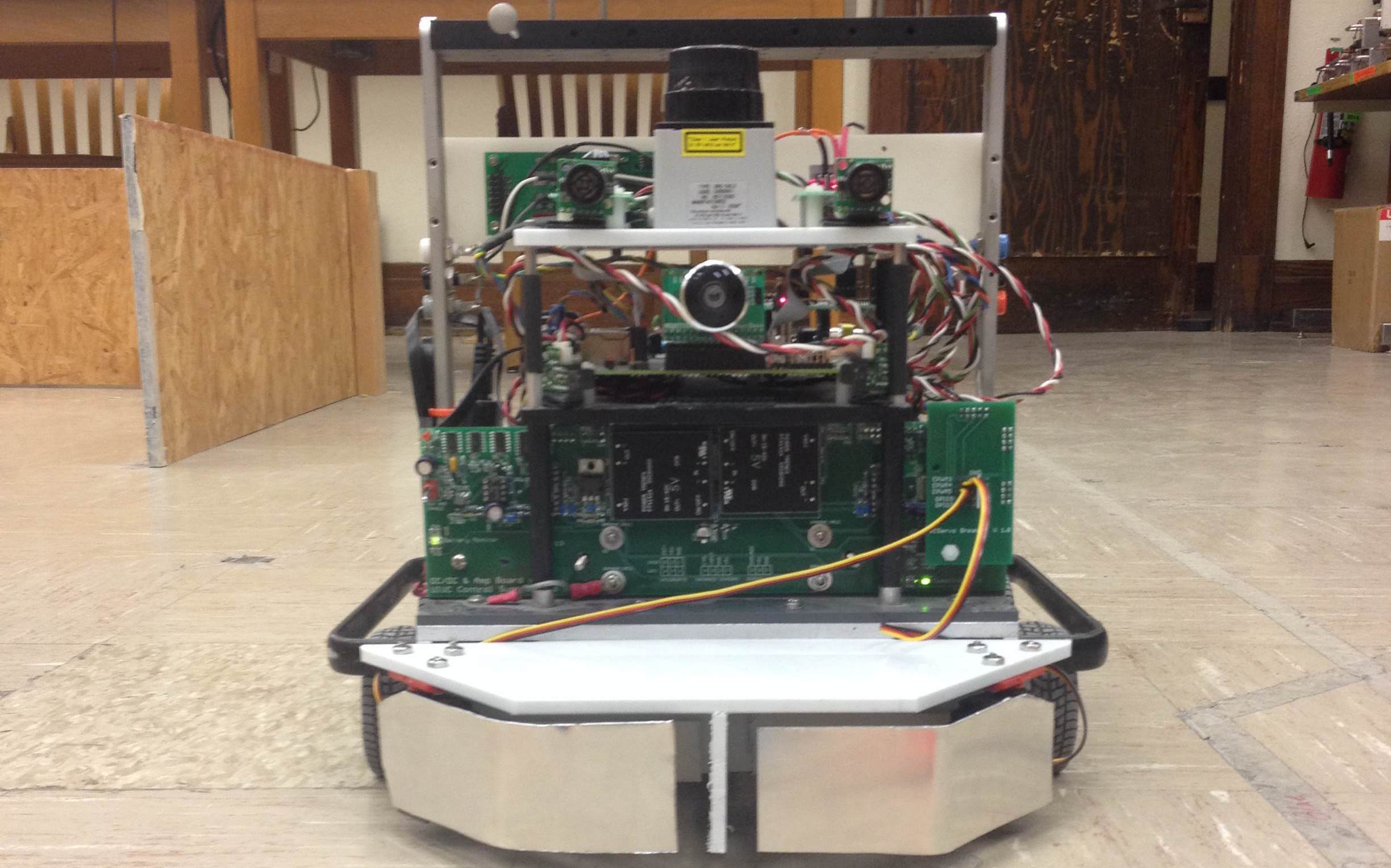
amos is fully featured
Intelligent
Equipped with LADAR sensors and an A* path planning algorithm, amos intelligently navigates and learns the obstacle course.
Agile
Two independent metalic arms controlled by RC servo motos makes amos able to grab, collect, and discharge both blue and orange golf balls.
Fast
Since amos plans an optimal path, time-in-course is drastically shorter than other robots using traditional bug avoidance algorithms.