Team 8
Left to right: Chenzhang
Xiao, Joe Brochu, Ray Fiedler, Cesar Flores
Summary:
For our
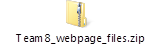
project we used a bug0 algorithm to navigate the map as well as a “flap” design
for our ball grabber. A central case-switch statement was used to shift between
the following modes: a point to point mode using the provided kalman filter/optitrack code,
right and left wall following algorithms, ball grabbing modes for blue and
orange balls, and ball releasing modes for both blue and orange balls. When
navigating the course, the robot would begin in point to point mode and enter
wall following (highest priority) to avoid obstacles and ball grabbing mode to
capture golf balls. Wall following mode would exit back to point to point mode
when the robot had moved around the obstacle and was once again facing its
target. Once done navigating the course, the robot entered ball release mode.
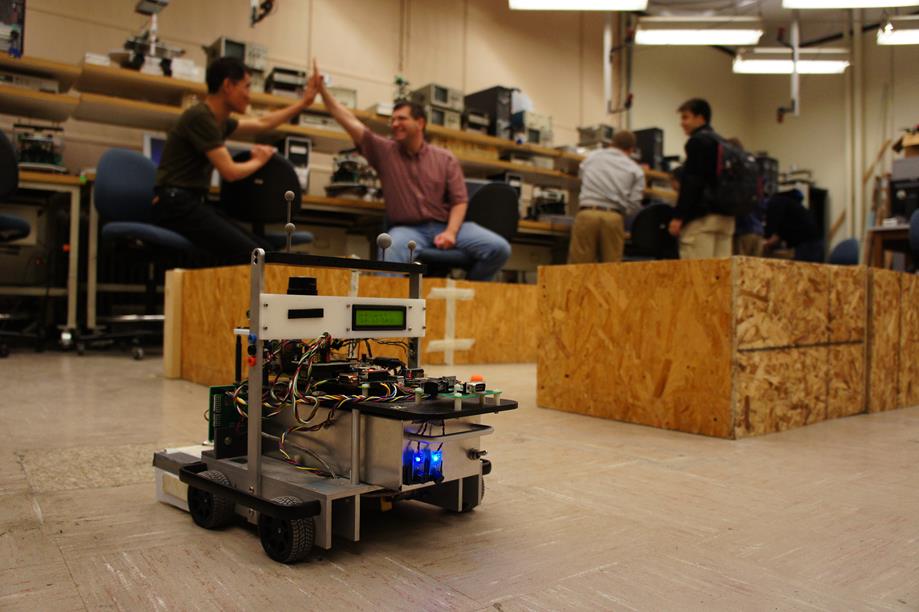
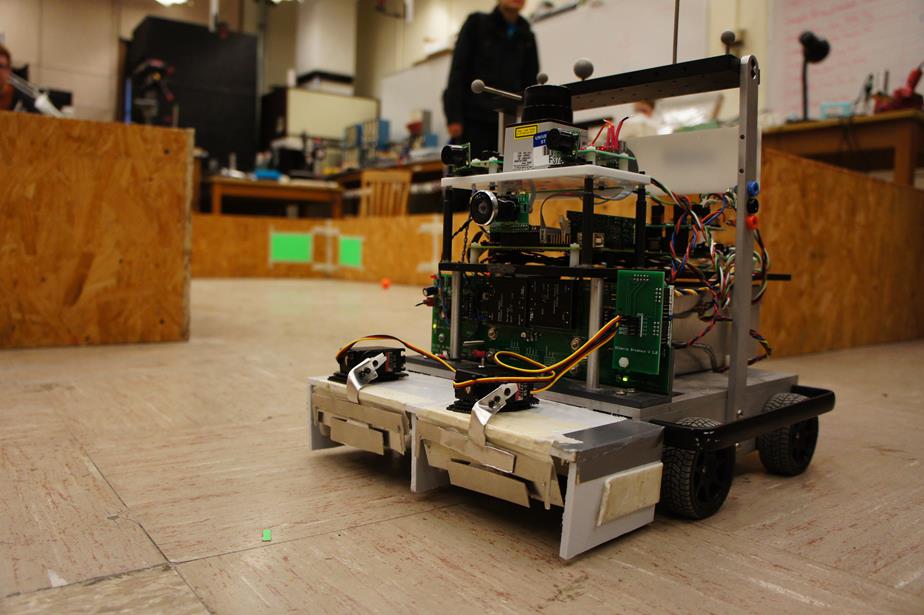
In order to capture golf balls, the robot would ram the golf ball with the
appropriate side of the grabber, forcing the ball through a flap. The flaps
were prevented from opening outwards by a servo controlled stop. When releasing
the balls, the stop was lifted and the robot reversed quickly.
Code:
Pictures:
Video:
https://www.youtube.

