GE423
Cheaply
Improvements
Objective
Our objective
was to implement mechanical and circuit layout changes to improve upon the
original Cheaply. The main changes we made were
downsizing the motor and fly wheel, moving the shaft angle sensor onto the slip
ring circuit board and modifying the four legs to allow for both the original
configuration and the new, smaller, configuration to be made with one common
kit.
Background on Cheaply and Cubli
Cubli is a famous
control’s project that uses three reaction wheels and brake calipers to swing a
cube up on its corner and balance it. It can balance itself on inclines, roll
around a room and balance on an edge. The Cheaply
project takes this concept and simplifies it to one reaction wheel that allows
the cube to balance just on one edge. Its body is made of the printed circuit
boards that run its electronics, so there is no need for an extra cubic shell.
Using an affordable motor, battery and microcontroller, the Cheaply
costs around 75$ and is very easy to assemble.
The Cheaply uses a similar state-space model to an inverted
pendulum. Its non-linear dynamics are linearized around its balancing point and
a state feedback controller is implemented to stabilize it.
Improvements
The
first requirement was to redesign the printed circuit boards(PCBs)
to have the magnetic encoder on board instead of on a separate board that
needed to be added to the assembly. This change allowed the whole package to
become much more compact because the slip ring PCB could now sit as close to
the magnetic on the motor shaft as allowed by the magnetic encoder sensor. Combining
this with the smaller motor resulted in a significant size reductions. To allow
for the original motor to still be used, we designed the legs to have multiple
solder points for the header pins. The legs can be cut to whichever
configuration needed and there will still be holes to solder the header pins to.
After
assembling the Cheaply we experimented with different
sized fly wheels. With the Cheaply significant lighter, we found that we needed
a medium sized flywheel that added some weight to the system. Too large of a
fly wheel resulted in a sluggish response, while too small of a flywheel
resulted in the motor spinning up way to quickly and never stabilizing the
system. We were able to have a medium sized flywheel machined that was in the
middle of the weight range and on the bigger side for moment of inertia.
To
keep the center of gravity low we mounted the battery on the opposite side of
the flywheel and as low as possible. Due to the weight of the battery, we had
to add a counter weight to the opposite side to keep the Cheaply
from tipping over. With this setup we were eventually able to get it to
stabilize if perfectly setup.
Once
the Cheaply was able to keep itself upright we tuned
the controller gains to strengthen the response. We ended up significantly
increasing our gains to make the Cheaply as robust as
possible to pokes.
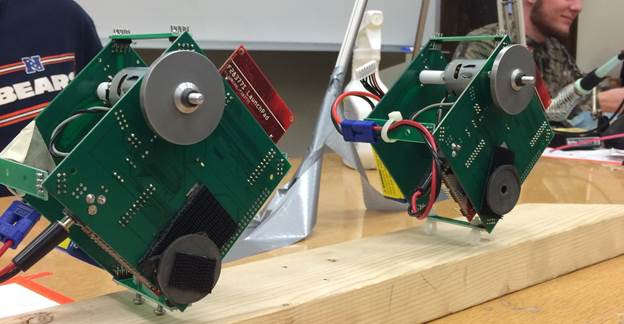
This
process was repeated for a second Cheaply that
balanced on eyelet screws instead of normal screws. The rounded eyelets make
for a slightly more unstable system, but with some tuning of the gains it is
able to balance.
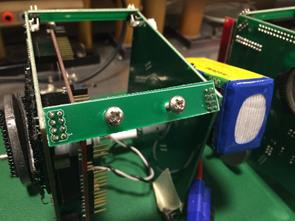
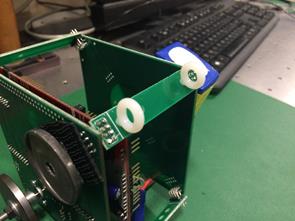
Normal Screws vs. eyelet screws
Further Improvements
Future
updates will include a Cheaply that can balance
hanging upside down and wifi tuning capabilities.
Currently the Cheaply must be plugged in to have its
gains changed. The cables help the Cheaply balance
and, when removed, cause the Cheaply to become unstable. It becomes tedious to
constantly unplug and plug the Cheaply back in, so wifi capabilities will allow for tuning through Labview without being plugged in.
Group Members

Michael Bastanipour Sherrie
Xiaoyue Chen
Acknowledgements

Dan
Block