Project Overview
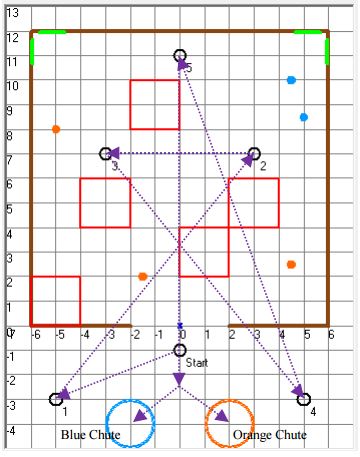
The goal of our final project is to train the robot car to move thourgh a maze using astar algorithm and optitrack system and pick up colored golf balls on the way. The car can detect and avoid obstacles using ladar and pick up the golf balls using the griper we installed on the robot. The car should go to 5 destination points inside the maze and collect the orange balls and blue golf balls on its ways, after the run, it should drop off the ballss
Astar Algorithm and Gripper Code
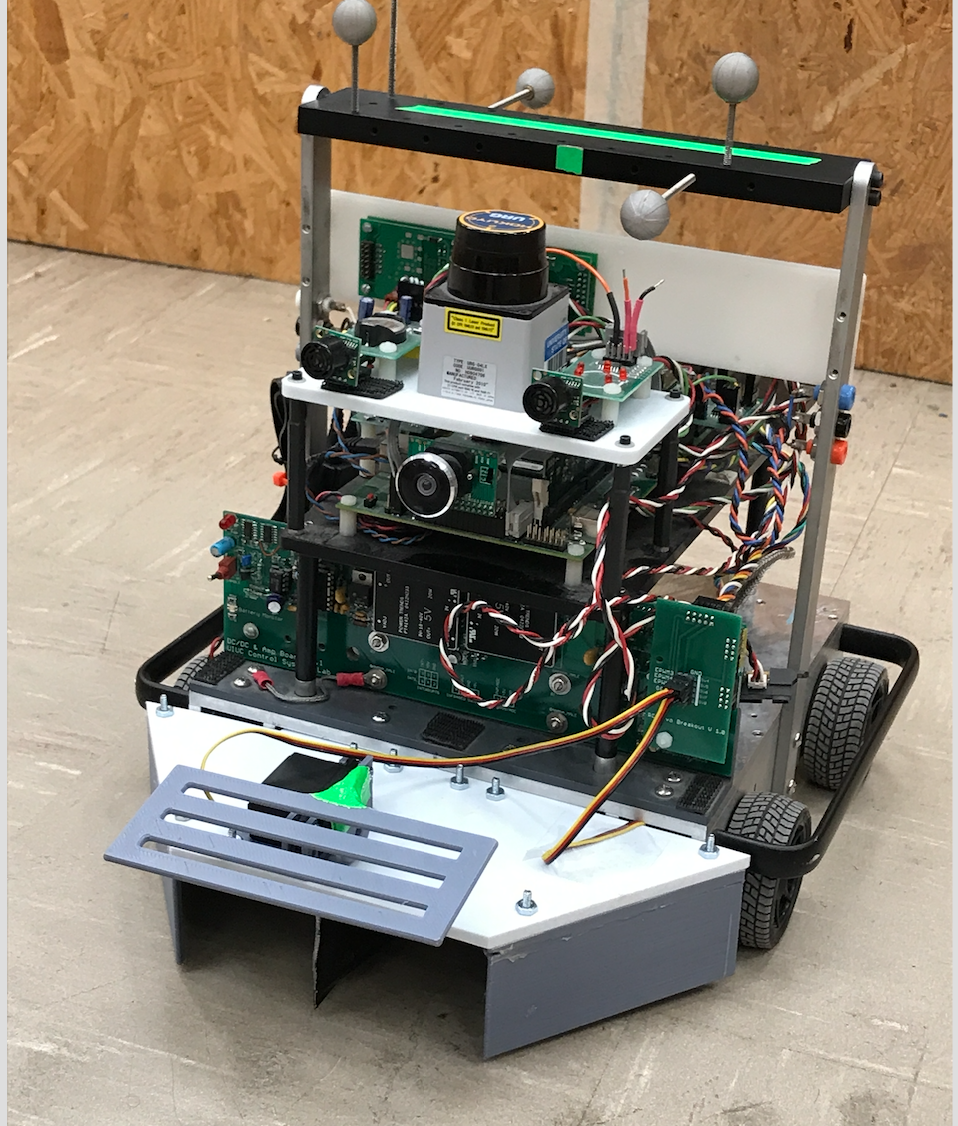
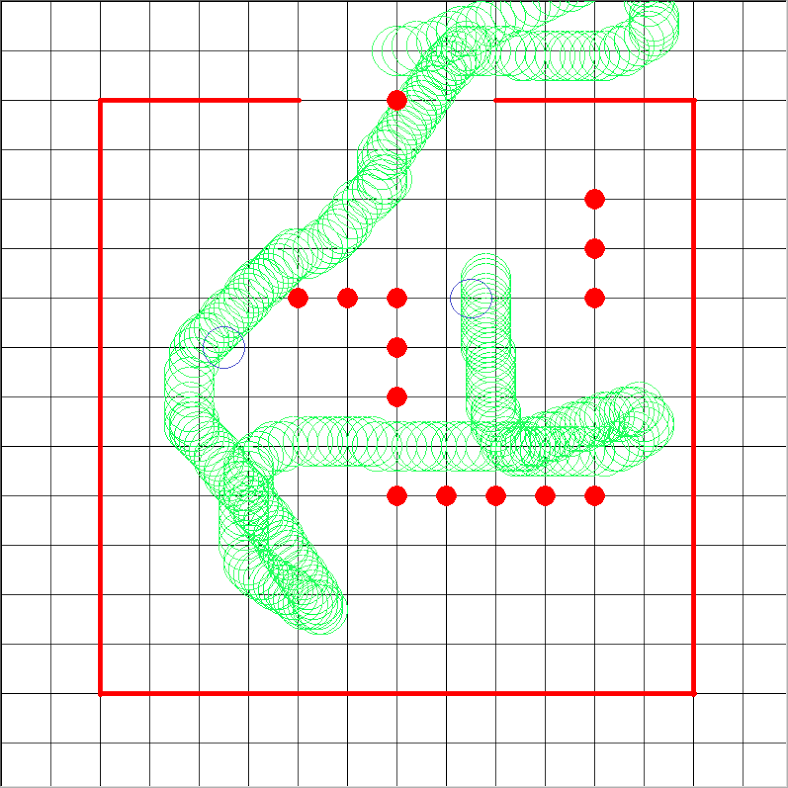
For our robot, we utilized the LADAR to detect obstacles in a ~150-160o arc in front of the robot. We created an algorithm that plotted the entire obstacle based on detected points and saved it to a map. The obstacle map allowed us to run the A-star algorithm, a least-cost path-planning algorithm that then plotted the optimal route from waypoint to waypoint. Ball-detection was done with a CMOS camera in the Bayer pattern, and we used MATLAB to process pictures and determine HSV/BGR values for ball detection. Our ball-collection mechanism consisted of a gate and a “tongue” separating two compartments to store the two different ball colors, with the entire mechanical design done in CAD and manufactured with a 3-D printer. To collect balls, we had a basic closed feedback loop algorithm that ensured that we were on the right track to pick the balls up. These obstacle/ball positions and the robot path data was sent over to a LabView interface on desktop which we used to debug and optimize our code.
Results
Running our robot in the competition, we were able to collect two balls in an average amount of time without hitting any obstacles. Our robot was able to detect balls from roughly 3-4 feet away (capture condition based on 25 orange or blue pixels). However, a notable point was that our TMS 320 ARM processor failed the night before the competition rendering us unable to test and optimize our robot to our desired level. Final thoughts and recommendations: Our group members were tied up with projects and was unable to commit much time before finals week. We were able to deliver our project in time, but, we originally intended to do way more optimization work. There will always be unforeseen circumstances (in our case, our hardware failed), and we very strongly (cannot emphasize this point more) recommend for future groups to start earlier, even if you’re extremely familiar and proficient with the material.
Group Members
_____Boyu Li_____

Path Planning, Obstacle Avoidance, Website Page
_____Howy______

Code Debug, Ball Collector, Labview
_____Tom______

Gipper Mechanism, Labview
_____Patric______

Ball Collector, Ball Tracking
Special Thanks to...
Dan Block

Logan Matthew Courtney
